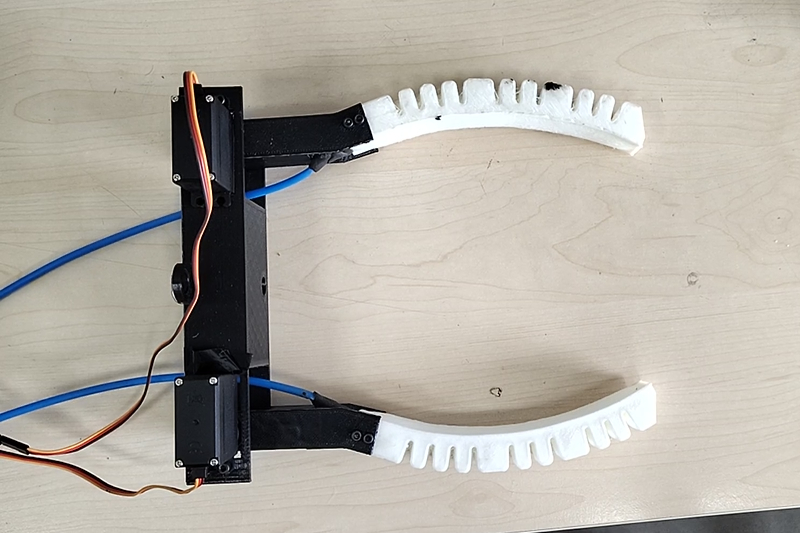
Research Soft Pneumatic-Controlled, Finger-Inspired Robotic Gripper Inspired by human fingers, designed to handle and delicately grip fragile round objects. Autonomuos Agricultural Weed Removal Robot A robot developed as a Final Year Capstone Project under the TIET-TAU Center of Excellence for Food Security 2D Hydrodynamic Analysis of an Anguilliform-Inspired Robot Analyzing Aquatic Robotics Inspired by Eels Swarming of UAVs and Rovers for Precision Pest Control and Harvesting